XS Europe is an initiative of AIC4NL. Its goal is to help Dutch research institutions build relationships with international partners who excel in AI. In this way, we strengthen the Netherlands’ position in Europe and lay the groundwork for larger collaborative projects. These are relatively short-term and small-scale projects focused on cutting-edge AI topics. Now that the programs have been completed, we’re looking back on them with the researchers.
Self-driving cars struggle to understand complex and ever-changing traffic situations in Europe. With a grant from the National Growth Fund’s AiNed program, Yancong Lin has developed new methods based on artificial intelligence (AI) that bring autonomous driving technology closer to practical application on European roads. Most existing self-driving systems have been trained on data collected in the United States or China. “But Europe needs its own AI solutions,” says Lin. “Models that understand European roads, cities, and road users.”
Text: Aafje Sierksma | Photo: Max Philippi

Learning Movement Without Manual Labels
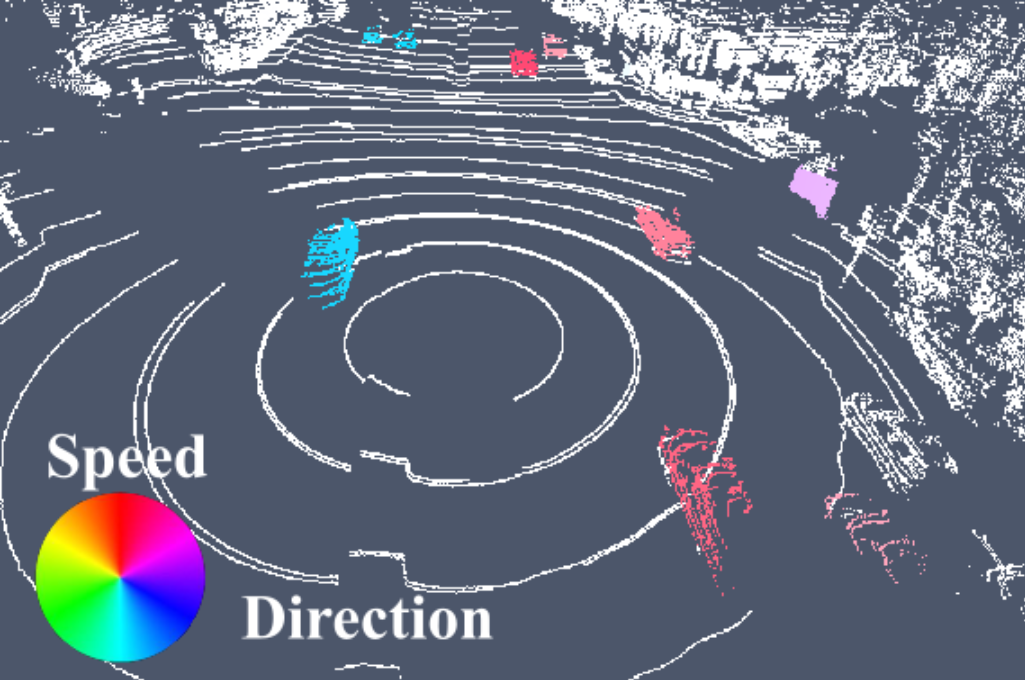
At the heart of his research is LiDAR, a laser sensor widely used in self-driving cars. LiDAR is mounted on top of a vehicle and continuously scans the surroundings, generating millions of data points. “Each point tells us that there is ‘something’ there,” Lin explains. “But it doesn’t tell us whether that object is moving, in which direction, or how fast.” To address this, Lin developedunsupervisedscene flowestimation, a method that estimates 3D motion without labeled data. “This means we can train AI models simply by driving and collecting data,” says Lin. “And it eliminates the need to hire expensive teams to manually label the data, making the approach easier to scale.”
Consistency of Movement
But detecting motion alone is not enough. Lin’s second contribution focuses on motion consistency. His methods ensure that all LiDAR points belonging to the same object are predicted in a consistent manner. “This significantly improves the stability and reliability of motion predictions,” Lin explains. “That level of realism is essential for safety-critical applications such as autonomous driving.”
Quick Decisions
In real-world traffic, every millisecond counts. That’s why Lin focuses on“real-time inference” in his third paper. His models are designed to process LiDAR data quickly enough to be used immediately in a moving vehicle. To achieve this, Lin worked with test vehicles equipped with real sensors and onboard computer systems. “This helped bridge the gap between academic research and practical application,” he says. “It’s not just something that works on paper.”
Personal and Academic Impact
Lins’ project is a collaboration between TU Delft and ETH Zurich. His research was so successful that his work is being continued as part of a doctoral program at TU Delft. The fellowship also had a significant impact on his career. It helped him demonstrate his ability to lead independent research, which contributed to his current position as an assistant professorof Computer Visionat the University of Nottingham.
Looking ahead, Lin emphasizes the importance of efficient AI. “Universities can’t compete with large tech companies in terms of scale,” he says. “But by focusing on efficiency and making models smaller, faster, and less energy-intensive, we can still make a real impact.”
About the National Growth Fund (NGF) AiNed XS Europe
The NGF AiNed XS Europe call, developed in collaboration with NWO, has funded forty one-year projects that enable researchers to conduct curiosity-driven, high-risk AI research in collaboration with European partners. It supports the rapid exploration of bold ideas where the outcomes are uncertain, but every result contributes to scientific progress. Participants in the NGF AiNed XS Europe call reviewed each other’s proposals. Lin found this review process to be both challenging and valuable. “Although reviewing proposals on unfamiliar topics wasn’t always easy, the wide variety of disciplines made it clear just how broadly AI can be applied.”
Source:NWO



