XS Europe is een instrument van AIC4NL. Het doel is om Nederlandse kennisinstellingen te helpen relaties op te bouwen met buitenlandse partijen die excelleren in AI. Zo versterken we de Nederlandse positie in Europa en leggen we een basis voor grotere samenwerkingsprojecten. Het gaat hierbij om relatief korte en kleine projecten rond vooruitstrevende AI-onderwerpen. Nu de programma’s zijn afgerond, blikken we terug met de onderzoekers.
Zelfrijdende auto’s hebben moeite om complexe en veranderende verkeerssituaties in Europa te begrijpen. Met een subsidie van het Nationaal Groeifonds-programma AiNed heeft Yancong Lin nieuwe methoden op basis van kunstmatige intelligentie (AI) ontwikkeld die de technologie voor autonoom rijden dichter bij toepassing op Europese wegen brengen. De meeste bestaande zelfrijdende systemen zijn getraind op gegevens die in de Verenigde Staten of China zijn verzameld. ‘Maar Europa heeft zijn eigen AI-oplossingen nodig,’ zegt Lin. ‘Modellen die Europese wegen, steden en weggebruikers begrijpen.’
Tekst: Aafje Sierksma | Beeld: Max Philippi

Beweging leren zonder handmatige labels
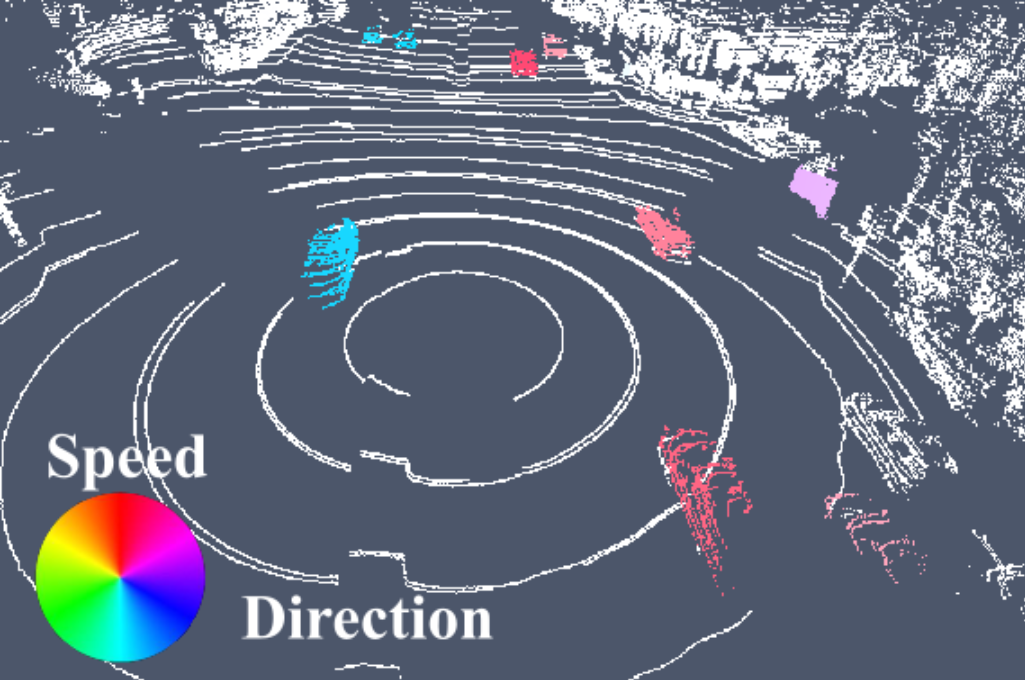
De kern van zijn onderzoek is LiDAR, een lasersensor die veel wordt gebruikt in zelfrijdende auto’s. LiDAR wordt bovenop een voertuig gemonteerd en scant continu de omgeving, waardoor miljoenen gegevenspunten worden gegenereerd. ‘Elk punt vertelt ons dat er ‘iets’ is,’ legt Lin uit. ‘Maar het vertelt ons niet of dat object beweegt, in welke richting, of hoe snel.’ Lin ontwikkelde daarvoor unsupervised scene flow estimation, een methode die 3D-beweging inschat zonder gelabelde data. ‘Dit betekent dat we AI-modellen kunnen trainen door simpelweg te rijden en gegevens te verzamelen,’ zegt Lin. ‘En het voorkomt dat we dure teams moeten inhuren om de gegevens handmatig te labelen, waardoor de aanpak gemakkelijker op te schalen is.’
Bewegingsconsistentie
Maar het detecteren van beweging alleen is niet voldoende. Lins tweede bijdrage richt zich op bewegingsconsistentie. Zijn methoden zorgen ervoor dat alle LiDAR-punten die bij hetzelfde object horen, op een consistente manier worden voorspeld. ‘Dit verbetert de stabiliteit en betrouwbaarheid van bewegingsvoorspellingen aanzienlijk,’ legt Lin uit. ‘Dat niveau van realisme is essentieel voor veiligheidskritische toepassingen zoals autonoom rijden.’
Snelle beslissingen
In het echte verkeer telt elke milliseconde. Daarom richt Lin zich in zijn derde bijdrage op ‘realtime-inferentie’. Zijn modellen zijn zo ontworpen dat ze LiDAR-gegevens snel genoeg verwerken om in het rijdende voertuig direct te worden gebruikt. Lin werkte hiervoor met testvoertuigen die waren uitgerust met echte sensoren en boordcomputersystemen. ‘Dit hielp de kloof tussen academisch onderzoek en praktische toepassing te overbruggen’, zegt hij. ‘Het is niet alleen iets dat op papier werkt.’
Persoonlijke en wetenschappelijke impact
Lins project is een samenwerking tussen de TU Delft en ETH Zürich. Zijn onderzoek was zo succesvol dat zijn werk wordt voortgezet in een promotieonderzoek aan de TU Delft. De beurs had ook een sterke impact op zijn carrière. Het hielp hem om blijk te geven van zelfstandig onderzoekleiderschap, wat bijdroeg aan zijn huidige functie als universitair docent Computer Vision aan de Universiteit van Nottingham.
Voor de toekomst benadrukt Lin het belang van efficiënte AI. ‘Universiteiten kunnen qua schaal niet concurreren met grote technologiebedrijven’, zegt hij. ‘Maar door ons te richten op efficiëntie en modellen kleiner, sneller en minder energie-intensief te maken, kunnen we nog steeds echte impact realiseren.’
Over Nationaal Groeifonds (NGF) AiNed XS Europe
De NGF AiNed XS Europe-call, ontwikkeld in samenwerking met NWO, heeft veertig eenjarige projecten gefinancierd die onderzoekers in staat stellen om samen met Europese partners nieuwsgierigheidsgedreven, risicovol AI-onderzoek te verrichten. Het ondersteunt het snel verkennen van gedurfde ideeën waarbij de uitkomsten onzeker zijn, maar elk resultaat bijdraagt aan wetenschappelijke vooruitgang. Deelnemers aan de NGF AiNed XS Europe-call beoordeelden elkaars voorstellen. Lin ervoer deze beoordelingsprocedure als zowel uitdagend als waardevol. ‘Hoewel het beoordelen van voorstellen met onbekende onderwerpen niet altijd even gemakkelijk was, maakten de zeer uiteenlopende disciplines duidelijk hoe breed AI kan worden toegepast.’
Bron: NWO



